

1. Matriz de cambio de base
Recordemos que las coordenadas de un vector $v$ en un espacio vectorial $\mathbb{R}^n$ con respecto a una base $\mathcal{B}=\{v_{1}, v_{2},...,v_{n}\}$ para $\mathbb{R}^n$ son los únicos coeficientes $c_1, c_2,\dots,c_n$ que satisfacen la relación:
\[
v=c_{1}v_{1}+c_{2}v_{2}+\dots+c_{n}v_{n}.
\]
Estas coordenadas forman el vector de coordenadas de $v$ con respecto a $\mathcal{B}$:
\[
[v]_{\mathcal{B}}=\begin{bmatrix} c_1 \\ c_2 \\ \vdots \\ c_n \end{bmatrix}.
\]
Este vector depende del orden en que se consideren los vectores en $\mathcal{B}$, por eso es más apropiado considerar $\mathcal{B}$ como una tupla de vectores, que como un conjunto: $\mathcal{B}=(v_1, v_2, \ldots, v_n)$. Recordemos que, por la definición de la suma de dos vectores y la multiplicación de un vector por un escalar, las coordenadas satisfacen las siguientes propiedades: Para todo $u,v\in \mathbb{R}^n$ y $\alpha \in\mathbb{R}$,
\begin{align*}
[u+v]_\mathcal{B} &= [u]_\mathcal{B} + [v]_\mathcal{B},\\
[\alpha u]_\mathcal{B} &= \alpha [u]_\mathcal{B},
\end{align*}
Las coordenadas de un vector dependen de la base. Vamos a estudiar como pasar de las coordenadas con respecto a una base a las coordenadas con respecto a otra.
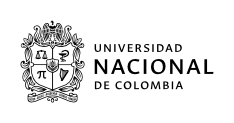
Ejemplo: Consideremos el espacio vectorial $\mathbb{R}^2$ con bases $\mathcal{B}=(u_1,u_2)$ y $\mathcal{C}=(v_1,v_2)$ donde
\[
u_1=\begin{bmatrix} -1 \\ 2 \end{bmatrix}, u_2=\begin{bmatrix} 2 \\
-1 \end{bmatrix} \ \text{ y } \ v_1=\begin{bmatrix} 1 \\ 0 \end{bmatrix},
v_2=\begin{bmatrix} 1 \\ 1 \end{bmatrix}.
\]
1. Para $x\in\mathbb{R}^2$ con $[x]_\mathcal{B}=\begin{bmatrix} 3 \\ 2 \end{bmatrix}$, encuentre $[x]_\mathcal{C}$.
2. Para $x\in\mathbb{R}^2$ con $[x]_\mathcal{B}=\begin{bmatrix} c_1 \\ c_2 \end{bmatrix}$, encuentre $[x]_\mathcal{C}$.
Solución 1. Con $[x]_\mathcal{B}=\begin{bmatrix} 3 \\ 2\end{bmatrix}$, tenemos $x = 3 \cdot u_1 + 2 \cdot u_2$ y entonces $[x]_\mathcal{C} = 3 \cdot [u_1]_\mathcal{C} + 2\cdot [u_2]_\mathcal{C}$. Para obtener $ [u_1]_\mathcal{C}=\begin{bmatrix} a_{1} \\ a_{2} \end{bmatrix}$ y $[u_2]_\mathcal{C}=\begin{bmatrix} b_{1} \\ b_{2} \end{bmatrix}$ necesitamos expresar los vectores de la base $\mathcal{B}$ en términos de los vectores de la base $\mathcal{C}$ resolviendo los sistemas
\[a_1 v_1 +
a_2 v_2 = u_1 \text{ y } b_1 v_1 + b_2 v_2 = u_2:
\]
\begin{align*}
a_1 \begin{bmatrix} 1 \\ 0 \end{bmatrix} + a_2 \begin{bmatrix} 1 \\
1 \end{bmatrix} = \begin{bmatrix} -1 \\ 2 \end{bmatrix}, & & b_1
\begin{bmatrix} 1 \\ 0 \end{bmatrix} + b_2 \begin{bmatrix} 1 \\ 1
\end{bmatrix} = \begin{bmatrix} 2 \\ -1 \end{bmatrix}.
\end{align*}
Usando la matriz inversa y expresando matricialmente obtenemos
\[
\Big[[u_1]_\mathcal{C}\,|\, [u_2]_\mathcal{C}\Big] =
\begin{bmatrix} a_1 & b_1 \\ a_2 & b_2 \end{bmatrix} =
\begin{bmatrix} 1 & 1 \\ 0 & 1 \end{bmatrix}^{-1} \begin{bmatrix} -1 & 2 \\ 2 & -1 \end{bmatrix} =
\begin{bmatrix} 1 & -1 \\ 0 & 1 \end{bmatrix}\begin{bmatrix} -1 & 2 \\ 2 & -1 \end{bmatrix} = \begin{bmatrix} -3 & 3 \\ 2 & -1 \end{bmatrix}.
\]
Entonces
\[
[x]_\mathcal{C} = 3 \cdot [u_1]_\mathcal{C} + 2\cdot [u_2]_\mathcal{C} = \Big[[u_1]_\mathcal{C}\,|\,
[u_2]_\mathcal{C}\Big] \begin{bmatrix} 3 \\ 2 \end{bmatrix} =
\begin{bmatrix} -3 & 3 \\ 2 & -1 \end{bmatrix} \begin{bmatrix} 3 \\ 2 \end{bmatrix} = \begin{bmatrix} -3 \\ 4 \end{bmatrix}.
\]
2. Como generalización de la parte anterior, obtenemos que si $[x]_\mathcal{B}=\begin{bmatrix} c_1 \\ c_2 \end{bmatrix}$, entonces $[x]_\mathcal{C}=\begin{bmatrix} d_1 \\ d_2 \end{bmatrix}$ con
\[
\begin{bmatrix} d_1 \\ d_2 \end{bmatrix} = \Big[[u_1]_\mathcal{C}\,|\, [u_2]_\mathcal{C}\Big] \begin{bmatrix} c_1 \\ c_2 \end{bmatrix} =
\begin{bmatrix} -3 & 3 \\ 2 & -1 \end{bmatrix} \begin{bmatrix} c_1 \\ c_2 \end{bmatrix}.
\]
Comentarios: La matriz $\begin{bmatrix} -3 & 3 \\ 2 & -1\end{bmatrix}$ que relaciona $[x]_\mathcal{C}$ y $[x]_\mathcal{B}$ se llama la matriz de cambio de base y se denota $P_{\mathcal{C}\leftarrow\mathcal{B}}$ (la razón para la notación con la flecha hacia atrás se aclarará adelante). Con esto, la relación entre vectores de coordenadas es
\[
[x]_\mathcal{C} = P_{\mathcal{C}\leftarrow\mathcal{B}} [x]_\mathcal{B}.
\]
En el ejemplo vemos que
\[
P_{\mathcal{C}\leftarrow\mathcal{B}} = \Big[[u_1]_\mathcal{C}\,|\, [u_2]_\mathcal{C}\Big].
\]
Además, con la base canónica $\mathcal{E}=(e_1,e_2)$ de $\mathbb{R}^2$, $P_{\mathcal{E}\leftarrow \mathcal{B}}$ y $P_{\mathcal{E}\leftarrow \mathcal{C}}$ se definen similarmente:
\[
P_{\mathcal{E}\leftarrow\mathcal{B}} = \Big[[u_1]_\mathcal{E}\,|\, [u_2]_\mathcal{E}\Big]
=\begin{bmatrix} -1 & 2 \\ 2 & -1 \end{bmatrix}, \;\;\;
P_{\mathcal{E}\leftarrow\mathcal{C}} = \Big[[v_1]_\mathcal{E}\,|\, [v_2]_\mathcal{E}\Big] = \begin{bmatrix} 1 & 1 \\ 0 & 1 \end{bmatrix}.
\]
y con esto observamos del ejemplo que
\[
P_{\mathcal{C}\leftarrow\mathcal{B}} = \begin{bmatrix} 1 & 1 \\ 0 & 1
\end{bmatrix}^{-1} \begin{bmatrix} -1 & 2 \\ 2 & -1 \end{bmatrix}
= P^{-1}_{\mathcal{E}\leftarrow\mathcal{C}} P_{\mathcal{E}\leftarrow\mathcal{B}}.
\]
Ahora enunciamos la definición general de la matriz de cambio de base y el teorema general de cambio de base.
Definición: Sean $\mathcal{B}=(u_1, u_2,\ldots, u_n)$ y $\mathcal{C}=(v_1, v_2,\ldots, v_n)$ bases para el espacio vectorial $\mathbb{R}^{n}$. La matriz
\[
P_{\mathcal{C}\leftarrow\mathcal{B}} = \Big[[u_1]_\mathcal{C}\,|\, [u_2]_\mathcal{C} \,|\, \cdots
\,|\, [u_n]_\mathcal{C}\Big]
\]
se llama la matriz de cambio de base de $\mathcal{B}$ a $\mathcal{C}$.
Como su nombre lo indica, la matriz de cambio de base de la base $\mathcal{B}$ a la base $\mathcal{C}$ nos da una manera para pasar de las coordenadas dadas en la base $\mathcal{B}$ a las coordenadas dadas en la base $\mathcal{C}$. De manera precisa tenemos el siguiente teorema.
Teorema: Sean $\mathcal{B}=(u_1, u_2,\ldots, u_n)$ y $\mathcal{C}=(v_1, v_2,\ldots, v_n)$ bases para el espacio vectorial $\mathbb{R}^{n}$. Entonces $P_{\mathcal{C}\leftarrow\mathcal{B}}$ es la única matriz que para todo $x\in \mathbb{R}^{n}$ satisface $ [x]_\mathcal{C} = P_{\mathcal{C}\leftarrow\mathcal{B}} [x]_\mathcal{B}. $
Prueba: Sea $x\in \mathbb{R}^{n}$ y $[x]_\mathcal{B}= \begin{bmatrix} c_1\\ c_2\\ \vdots \\ c_{n} \end{bmatrix}$. Esto significa que $x=c_1u_1+c_2u_2+\cdots+c_nu_n$, así
\begin{eqnarray*}
[x]_\mathcal{C} &=& [c_1u_1+c_2u_2+\cdots+c_nu_n]_\mathcal{C}
= c_1[u_1]_\mathcal{C}+c_2[u_2]_\mathcal{C}+\cdots+c_n[u_n]_\mathcal{C} \\
&=& \Big[[u_1]_\mathcal{C}\,|\, [u_2]_\mathcal{C} \,|\, \cdots \,|\, [u_n]_\mathcal{C}\Big] \begin{bmatrix} c_1\\ c_2\\ \vdots \\ c_{n} \end{bmatrix}
= P_{\mathcal{C}\leftarrow\mathcal{B}} [x]_\mathcal{B}.
\end{eqnarray*}
Para verificar la unicidad, supongamos que $[x]_\mathcal{C}=A[x]_\mathcal{B}$. Con $x=u_i$ se obtiene que $[u_i]_\mathcal{C}=Ae_i$, es decir, la $i$-ésima
columna de $A$ es $[u_i]_\mathcal{C}$. Así que $A=P_{\mathcal{C}\leftarrow\mathcal{B}}.$
Ejemplo: Consideremos la base $\mathcal{B}=(u_1,u_2)$ para $\mathbb{R}^{2}$, donde
\[
u_1=\begin{bmatrix} 1 \\ 1 \end{bmatrix}, u_2=\begin{bmatrix} -1 \\
1 \end{bmatrix}.
\]
Si $\mathcal{E}$ es la base canónica para $\mathbb{R}^{2}$, encontremos la matriz de cambio de base $P_{\mathcal{B}\leftarrow\mathcal{E}}$.
Solución: Por definición $P_{\mathcal{B}\leftarrow\mathcal{E}} = [[e_1]_\mathcal{B}\,|\, [e_2]_\mathcal{B}]$. Encontremos entonces $[e_1]_\mathcal{B}$ y $[e_2]_\mathcal{B}$. Para esto debemos escribir a los vectores $e_1=\begin{bmatrix} 1 \\ 0 \end{bmatrix}$ y $e_{2}=\begin{bmatrix} 0 \\ 1 \end{bmatrix}$ como combinación lineal de los vectores $u_{1}$ y $u_{2}$ de la base $\mathcal{B}$. Por simple inspección o resolviendo el sistema de ecuaciones lineales correspondientes se tiene que
\[
e_{1}=\frac{1}{2}u_1 -\frac{1}{2}u_2 \ \text{ y } \ e_{2}=\frac{1}{2}u_1 +\frac{1}{2}u_2.
\]
Con esto concluimos que
\[
P_{\mathcal{B}\leftarrow\mathcal{E}} = \begin{bmatrix} 1/2 & 1/2 \\ -1/2 & 1/2
\end{bmatrix}.
\]
El siguiente teorema relaciona el cambio de base $\mathcal{B}$ a $\mathcal{D}$ con los cambios de $\mathcal{B}$ a $\mathcal{C}$ y de $\mathcal{C}$ a $\mathcal{D}$, y el cambio de base $\mathcal{B}$ a $\mathcal{C}$ con el cambio de $\mathcal{C}$ a $\mathcal{B}$. Aquí se ve que la flecha hacia atrás en la notación es un buen mnemónico para tener claros los cambios de base.
Teorema: Sean $\mathcal{B}, \mathcal{C}, \mathcal{D}$ bases de $\mathbb{R}^{n}$. Entonces
1. $P_{\mathcal{D}\leftarrow\mathcal{B}} = P_{\mathcal{D}\leftarrow\mathcal{C}} P_{\mathcal{C}\leftarrow\mathcal{B}}$.
2. $P_{\mathcal{C}\leftarrow\mathcal{B}}$ es invertible y $(P_{\mathcal{C}\leftarrow\mathcal{B}})^{-1} = P_{\mathcal{B}\leftarrow\mathcal{C}}$.
Prueba:
1. Sea $\mathcal{B}=(u_1, u_2, \ldots, u_n)$. Entonces
\[
P_{\mathcal{D}\leftarrow\mathcal{B}} = \Big[[u_1]_\mathcal{D}\,|\, [u_2]_\mathcal{D} \,|\, \cdots \,|\, [u_n]_\mathcal{D}\Big]
\]
Pero para $[u_j]_\mathcal{D}$, usando cambio de base $\mathcal{C}$ a $\mathcal{D}$, tenemos que
\[
[u_j]_\mathcal{D} = P_{\mathcal{D}\leftarrow\mathcal{C}} [u_j]_\mathcal{C}
\]
y entonces
\begin{eqnarray*}
P_{\mathcal{D}\leftarrow\mathcal{B}} &=& \Big[ P_{\mathcal{D}\leftarrow\mathcal{C}} [u_1]_\mathcal{C}\,|\, P_{\mathcal{D}\leftarrow\mathcal{C}} [u_2]_\mathcal{C}\,|\, \cdots\,|\, P_{\mathcal{D}\leftarrow\mathcal{C}} [u_n]_\mathcal{C}\Big] \\
&=& P_{\mathcal{D}\leftarrow\mathcal{C}} \Big[[u_1]_\mathcal{C}\,|\, [u_2]_\mathcal{C} \,|\, \cdots \,|\, [u_n]_\mathcal{C}\Big] \\
&=& P_{\mathcal{D}\leftarrow\mathcal{C}} P_{\mathcal{C}\leftarrow\mathcal{B}}.\end{eqnarray*}
2. Usando la parte a. se obtiene que $P_{\mathcal{C}\leftarrow\mathcal{C}} = P_{\mathcal{C}\leftarrow\mathcal{B}} P_{\mathcal{B}\leftarrow\mathcal{C}}$. Pero $P_{\mathcal{C}\leftarrow\mathcal{C}}=I_n$, y entonces se concluye que $P_{\mathcal{C}\leftarrow\mathcal{B}}$ es invertible y $(P_{\mathcal{C}\leftarrow\mathcal{B}})^{-1} = P_{\mathcal{B}\leftarrow\mathcal{C}}$.
Ejercicios de práctica
Te invitamos a practicar los conocimientos aprendidos en esta parte de la clase realizando los siguientes ejercicios.