2. Matriz de una transformación lineal y cambio de base
Recordemos que si T:Rn→Rm es una transformación lineal existe su matriz estándar asociada [T] que satisface T(u)=[T]u. Esta matriz está asociada a las bases canónicas En en Rn y Em en Rm y la denotaremos por [T]Em←En y sabemos que [T]Em←En=[[T(e1)]Em|[T(e2)]Em|⋯|[T(en)]Em] .
Este concepto se generaliza a una transformación lineal T:Rn→Rm con bases Bn de Rn y Cm de Rm. El siguiente diagrama ilustra la situación: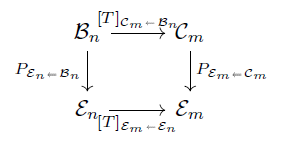 Sea Bn=(u1,…,un). Así tenemos [T]Cm←Bn=[[T(u1)]Cm|[T(u2)]Cm|⋯|[T(un)]Cm]. Y [T]Cm←Bn=(PEm←Cm)−1[T]Em←EnPEn←Bn.
Sea Bn=(u1,…,un). Así tenemos [T]Cm←Bn=[[T(u1)]Cm|[T(u2)]Cm|⋯|[T(un)]Cm]. Y [T]Cm←Bn=(PEm←Cm)−1[T]Em←EnPEn←Bn.
Definición: Si T:Rn→Rm es una transformación lineal, la matriz de T con respecto a las bases Bn=(u1,…,un) y Cm=(v1,…,vm), es la matriz denotada por [T]Cm←Bn que se define por:
[T]Cm←Bn=[[T(u1)]Cm|[T(u2)]Cm|⋯|[T(un)]Cm].
Observaciones:
1. Si n=m y Bn=Cn se escribe [T]B por simplicidad.
2. Si n=m y B≠C, observamos que la matriz de cambio de base es un caso particular de la matriz de una transformación. Más precisamente, con T=IdRn se tiene que
[IdRn]C←B=[[IdRn(u1)]C|[IdRn(u2)]C|⋯|[IdRn(un)]C]=[[u1]C|[u2]C|⋯|[un]C],
que es precisamente la matriz PC←B.
3. Sean Rn,Rm,Rp espacios vectoriales con bases Bn,Cm,Dp respectivamente, y sean T:Rn→Rm y S:Rm→Rp transformaciones lineales. Recordemos que entonces
[S∘T]Dp←Bn=[S]Dp←Cm[T]Cm←Bn.
4.Sea T:Rn→Rn una transformación lineal y sean B y C bases de Rn. Recordemos que entonces T es invertible si y sólo si la matriz [T]C←B es invertible, y en este caso,
([T]C←B)−1=[T−1]B←C.
Teorema: Sean Rn,Rm espacios vectoriales y T:Rn→Rm una transformación lineal. Además, sean B={u1,…,un},B′={u′1,…,u′n} bases para Rn y C,C′ bases para Rm. Entonces
[T]C′←B′=[[T(u′1)]C′|⋯|[T(u′n)]C′]=PC′←C[T]C←BPB←B′=P−1C←C′[T]C←BPB←B′.
Ejemplo: Sea T:R3→R2 la transformación lineal dada por
T⎡⎢⎣xyz⎤⎥⎦=[x−2yx+y−3z]
y considere las bases B=(e1,e1+e2,e1+e2+e3) y C=(e1+e2,e1−e2) donde E3=(e1,e2,e3) y E2=(e1,e2) son las bases canónicas de R2 y R3.
a. Determine la matriz estándar [T]E2←E3 de T.
b. Determine la matriz [T]C←B haciendo uso de la matriz [T] obtenida en a.
Solución:
a. Para encontrar [T]E2←E3 tenemos que calcular primero T(e1), T(e2) y T(e3). Utilizando la definición de T se obtiene que:
T(e1)=[11], T(e2)=[−21], T(e3)=[0−3].
Por lo tanto [T]E2←E3=[1−2011−3].
b. Haciendo uso del teorema, tenemos que
[T]C←B=⎡⎢⎣⎡⎢⎣T⎡⎢⎣100⎤⎥⎦⎤⎥⎦C|⎡⎢⎣T⎡⎢⎣110⎤⎥⎦⎤⎥⎦C|⎡⎢⎣T⎡⎢⎣111⎤⎥⎦⎤⎥⎦C⎤⎥⎦=[[11]C|[−12]C|[−1−1]C]=PC←E2[T]E2←E3PE3←B=(PE2←C)−1[T]E2←E3PE3←B=[111−1]−1[1−2011−3]⎡⎢⎣111011001⎤⎥⎦=12[111−1][1−1−112−1]=12[21−20−30].
El caso Rn=Rm: Consideramos el caso en que m=n y dos bases B y C para Rn. Si T:Rn→Rn es una transformación lineal, queremos estudiar la relación entre [T]B y [T]C. El teorema anterior se escribe entonces (reemplazando C por B y B′=C′ por C):
Teorema: Sean B y C bases para Rn y sea T:Rn→Rn una transformación lineal. Entonces
[T]C=P−1B←C[T]BPB←C.
Ejemplo: Sea T:R2→R2 dada por T[xy]=[x+3y2x+2y]. Para B=([11],[3−2]), obtenga [T]B.
Solución: Con E la base canónica, tenemos que
[T]E=[1322].
Además,
PE←B=[131−2].
Por lo tanto,
[T]B=[[T[11]]B|[T[3−2]]B]=P−1E←B[T]EPE←B=15[231−1]⋅[1322]⋅[131−2]=[400−1].
Ejercicios de práctica
Te invitamos a practicar los conocimientos aprendidos en esta parte de la clase realizando los siguientes ejercicios.