

2. Matriz de una transformación lineal y cambio de base
Recordemos que si $T:\mathbb{R}^n\rightarrow\mathbb{R}^m$ es una transformación lineal existe su matriz estándar asociada $[T]$ que satisface $T(u)=[T]u$. Esta matriz está asociada a las bases canónicas ${\mathcal{E}}_n$ en $\mathbb{R}^n$ y ${\mathcal{E}}_m$ en $\mathbb{R}^m$ y la denotaremos por $[T]_{{\mathcal{E}}_m\leftarrow{\mathcal{E}}_n}$ y sabemos que $[T]_{{\mathcal{E}}_m\leftarrow{\mathcal{E}}_n} = \Big[ [T(e_1)]_{{\mathcal{E}}_m} \,|\, [T(e_2)]_{{\mathcal{E}}_m} \,|\, \cdots \,|\, [T(e_n)]_{{\mathcal{E}}_m}\Big]$ .
Este concepto se generaliza a una transformación lineal $T:\mathbb{R}^n\rightarrow \mathbb{R}^m$ con bases $\mathcal{B}_n$ de $\mathbb{R}^n$ y $\mathcal{C}_m$ de $\mathbb{R}^m$. El siguiente diagrama ilustra la situación: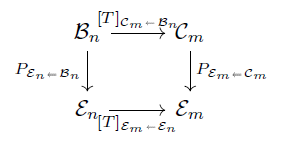 Sea $\mathcal{B}_n = (u_1, \ldots, u_n)$. Así tenemos $[T]_{{\mathcal{C}}_m\leftarrow{\mathcal{B}}_n} = \Big[ [T(u_1)]_{{\mathcal{C}}_m} \,|\,
Sea $\mathcal{B}_n = (u_1, \ldots, u_n)$. Así tenemos $[T]_{{\mathcal{C}}_m\leftarrow{\mathcal{B}}_n} = \Big[ [T(u_1)]_{{\mathcal{C}}_m} \,|\,
[T(u_2)]_{{\mathcal{C}}_m} \,|\, \cdots \,|\, [T(u_n)]_{{\mathcal{C}}_m}\Big]$. Y $[T]_{\mathcal{C}_m \leftarrow\mathcal{B}_n} =
(P_{{\mathcal{E}}_m \leftarrow\mathcal{C}_m})^{-1} [T]_{{\mathcal{E}}_m\leftarrow{\mathcal{E}}_n} P_{{\mathcal{E}}_n \leftarrow\mathcal{B}_n}.$
Definición: Si $T:\mathbb{R}^n\rightarrow \mathbb{R}^m$ es una transformación lineal, la matriz de $T$ con respecto a las bases $\mathcal{B}_n=(u_1, \ldots, u_n)$ y $\mathcal{C}_m=(v_1, \ldots, v_m)$, es la matriz denotada por $[T]_{{\mathcal{C}}_m\leftarrow{\mathcal{B}}_n}$ que se define por:
\[
[T]_{{\mathcal{C}}_m\leftarrow{\mathcal{B}}_n} = \Big[ [T(u_1)]_{{\mathcal{C}}_m} \,|\,[T(u_2)]_{{\mathcal{C}}_m} \,|\, \cdots \,|\, [T(u_n)]_{{\mathcal{C}}_m}\Big].
\]
Observaciones:
1. Si $n=m$ y $\mathcal{B}_n=\mathcal{C}_n$ se escribe $[T]_\mathcal{B}$ por simplicidad.
2. Si $n=m$ y $\mathcal{B}\neq \mathcal{C}$, observamos que la matriz de cambio de base es un caso particular de la matriz de una transformación. Más precisamente, con $T=\mbox{Id}_{\mathbb{R}^n}$ se tiene que
\[
[\mbox{Id}_{\mathbb{R}^n}]_{\mathcal{C}\leftarrow\mathcal{B}} = \Big[
[\mbox{Id}_{\mathbb{R}^n}(u_1)]_\mathcal{C} \,|\, [\mbox{Id}_{\mathbb{R}^n}(u_2)]_\mathcal{C}
\,|\, \cdots \,|\, [\mbox{Id}_{\mathbb{R}^n}(u_n)]_\mathcal{C}\Big] =
\Big[ [u_1]_\mathcal{C} \,|\, [u_2]_\mathcal{C} \,|\, \cdots \,|\,[u_n]_\mathcal{C}\Big],
\]
que es precisamente la matriz $P_{\mathcal{C}\leftarrow\mathcal{B}}$.
3. Sean $\mathbb{R}^n, \mathbb{R}^m , \mathbb{R}^p$ espacios vectoriales con bases $\mathcal{B}_n,\mathcal{C}_m,\mathcal{D}_p$ respectivamente, y sean $T:\mathbb{R}^n\rightarrow \mathbb{R}^m$ y $S:\mathbb{R}^m\rightarrow \mathbb{R}^p$ transformaciones lineales. Recordemos que entonces
\[
[S\circ T]_{\mathcal{D}_p\leftarrow\mathcal{B}_n} = [S]_{\mathcal{D}_p\leftarrow\mathcal{C}_m}
[T]_{\mathcal{C}_m\leftarrow\mathcal{B}_n}.
\]
4.Sea $T:\mathbb{R}^n\rightarrow \mathbb{R}^n$ una transformación lineal y sean $\mathcal{B}$ y $\mathcal{C}$ bases de $\mathbb{R}^n$. Recordemos que entonces $T$ es invertible si y sólo si la matriz $[T]_{\mathcal{C}\leftarrow\mathcal{B}}$ es invertible, y en este caso,
\[
([T]_{\mathcal{C}\leftarrow\mathcal{B}})^{-1} = [T^{-1}]_{\mathcal{B}\leftarrow\mathcal{C}}.
\]
Teorema: Sean $\mathbb{R}^n, \mathbb{R}^m$ espacios vectoriales y $T:\mathbb{R}^n\rightarrow\mathbb{R}^m$ una transformación lineal. Además, sean $\mathcal{B} = \{u_1, \ldots,u_n\}, \mathcal{B}'=\{u_1', \ldots, u_n'\}$ bases para $\mathbb{R}^n$ y $\mathcal{C}, \mathcal{C}'$ bases para $\mathbb{R}^m$. Entonces
\[
[T]_{\mathcal{C}' \leftarrow\mathcal{B}'} = \Big[ [T(u_1')]_{\mathcal{C}'}| \cdots |
[T(u_n')]_{\mathcal{C}'}\Big] = P_{\mathcal{C}'\leftarrow\mathcal{C}} [T]_{\mathcal{C}\leftarrow\mathcal{B}}
P_{\mathcal{B}\leftarrow\mathcal{B}'} = P_{\mathcal{C}\leftarrow\mathcal{C}'}^{-1} [T]_{\mathcal{C}\leftarrow\mathcal{B}}
P_{\mathcal{B}\leftarrow\mathcal{B}'}.
\]
Ejemplo: Sea $T:\mathbb{R}^3\rightarrow \mathbb{R}^2$ la transformación lineal dada por
\[
T\begin{bmatrix} x \\ y \\ z \end{bmatrix} = \begin{bmatrix} x-2y \\
x+y-3z\end{bmatrix}
\]
y considere las bases $\mathcal{B}=(e_1, e_1+e_2, e_1+e_2+e_3)$ y $\mathcal{C}=(e_1+e_2, e_1-e_2)$ donde $\mathcal{E}_3=(e_1, e_2, e_3)$ y $\mathcal{E}_2=(e_1,e_2)$ son las bases canónicas de $\mathbb{R}^2$ y $\mathbb{R}^3$.
a. Determine la matriz estándar $[T]_{\mathcal{E}_2\leftarrow\mathcal{E}_3}$ de $T$.
b. Determine la matriz $[T]_{\mathcal{C}\leftarrow\mathcal{B}}$ haciendo uso de la matriz $[T]$ obtenida en a.
Solución:
a. Para encontrar $[T]_{\mathcal{E}_2\leftarrow\mathcal{E}_3}$ tenemos que calcular primero $T(e_1)$, $T(e_2)$ y $T(e_3)$. Utilizando la definición de $T$ se obtiene que:
\[
T(e_1)=\begin{bmatrix} 1 \\1 \end{bmatrix}, \ \ T(e_2)=\begin{bmatrix} -2 \\1 \end{bmatrix}, \ \ T(e_3)=\begin{bmatrix} 0 \\-3 \end{bmatrix}.
\]
Por lo tanto $[T]_{\mathcal{E}_2\leftarrow\mathcal{E}_3}= \begin{bmatrix} 1& -2 & 0 \\ 1 & 1 & -3 \end{bmatrix}$.
b. Haciendo uso del teorema, tenemos que
\begin{eqnarray*}
[T]_{\mathcal{C}\leftarrow\mathcal{B}} &=& \left[ \left[T\left[
\begin{array} {c} 1 \\0 \\0 \end{array} \right]\right]_{\mathcal{C}}| \left[T\left[
\begin{array} {c} 1 \\1 \\0 \end{array}\right]\right]_{\mathcal{C}} | \left[T\left[
\begin{array} {c} 1 \\1 \\1 \end{array}\right]\right]_{\mathcal{C}}\right] = \left[\left[
\begin{array} {c} 1 \\1 \end{array}\right]_{\mathcal{C}}| \left[
\begin{array} {c} -1 \\2 \end{array}\right]_{\mathcal{C}} | \left[
\begin{array} {c} -1 \\-1 \end{array}\right]_{\mathcal{C}}\right] \nonumber \\
& = & P_{\mathcal{C}\leftarrow\mathcal{E}_2} [T]_{\mathcal{E}_2\leftarrow\mathcal{E}_3} P_{\mathcal{E}_3\leftarrow\mathcal{B}}
= (P_{\mathcal{E}_2\leftarrow\mathcal{C}})^{-1} [T]_{\mathcal{E}_2\leftarrow\mathcal{E}_3} P_{\mathcal{E}_3\leftarrow\mathcal{B}}
= \begin{bmatrix} 1 & 1 \\ 1 & -1 \end{bmatrix}^{-1} \begin{bmatrix} 1 & -2 & 0 \\ 1 & 1 & -3 \end{bmatrix}
\begin{bmatrix} 1 & 1 & 1 \\ 0 & 1 & 1 \\ 0 & 0 & 1 \end{bmatrix} \\
&=& \frac{1}{2} \begin{bmatrix} 1 & 1 \\ 1 & -1 \end{bmatrix} \begin{bmatrix} 1 & -1 & -1 \\ 1 & 2 & -1 \end{bmatrix}
= \frac{1}{2} \begin{bmatrix} 2 & 1 & -2 \\ 0 & -3 & 0 \end{bmatrix}.
\end{eqnarray*}
El caso $\mathbb{R}^n=\mathbb{R}^m$: Consideramos el caso en que $m=n$ y dos bases $\mathcal{B}$ y $\mathcal{C}$ para $\mathbb{R}^n$. Si $T:\mathbb{R}^n\rightarrow \mathbb{R}^n$ es una transformación lineal, queremos estudiar la relación entre $[T]_\mathcal{B}$ y $[T]_\mathcal{C}$. El teorema anterior se escribe entonces (reemplazando $\mathcal{C}$ por $\mathcal{B}$ y $\mathcal{B}'=\mathcal{C}'$ por $\mathcal{C}$):
Teorema: Sean $\mathcal{B}$ y $\mathcal{C}$ bases para $\mathbb{R}^n$ y sea $T:\mathbb{R}^n\rightarrow \mathbb{R}^n$ una transformación lineal. Entonces
\[
[T]_\mathcal{C} = P^{-1}_{\mathcal{B}\leftarrow\mathcal{C}} [T]_\mathcal{B} P_{\mathcal{B}\leftarrow\mathcal{C}}.
\]
Ejemplo: Sea $T:\mathbb{R}^2\rightarrow\mathbb{R}^2$ dada por $ T\begin{bmatrix} x \\ y
\end{bmatrix} = \begin{bmatrix} x+3y \\ 2x+2y \end{bmatrix}. $ Para $\mathcal{B}=\left(\begin{bmatrix} 1 \\ 1 \end{bmatrix}, \begin{bmatrix} 3
\\ -2 \end{bmatrix}\right)$, obtenga $[T]_\mathcal{B}$.
Solución: Con $\mathcal{E}$ la base canónica, tenemos que
\[
[T]_\mathcal{E} = \begin{bmatrix} 1 & 3 \\ 2& 2 \end{bmatrix}.
\]
Además,
\[
P_{\mathcal{E}\leftarrow\mathcal{B}} = \begin{bmatrix} 1 & 3 \\ 1 & -2 \end{bmatrix}.
\]
Por lo tanto,
\begin{eqnarray*}
[T]_\mathcal{B} & = & \left[\left[T\left[\begin{array}{c} 1 \\1
\end{array}\right]\right]_\mathcal{B} | \left[T\left[\begin{array}{c} 3 \\-2
\end{array}\right]\right]_\mathcal{B}\right] \\
&=& P_{\mathcal{E}\leftarrow\mathcal{B}}^{-1} [T]_\mathcal{E} P_{\mathcal{E}\leftarrow\mathcal{B}} \\
&=& \frac{1}{5} \begin{bmatrix} 2 & 3 \\ 1 & -1 \end{bmatrix} \cdot \begin{bmatrix} 1 & 3 \\ 2& 2 \end{bmatrix} \cdot
\begin{bmatrix} 1 & 3 \\ 1 & -2 \end{bmatrix} \\
&=& \begin{bmatrix} 4 & 0 \\ 0 & -1 \end{bmatrix}.
\end{eqnarray*}
Ejercicios de práctica
Te invitamos a practicar los conocimientos aprendidos en esta parte de la clase realizando los siguientes ejercicios.